飛行計画を立てて計画で決められたインターバルでカメラのシャッターを切っていきます。
シャッターを切った時間とGPSの情報を同期させます。
単独測位 DGPS 後処理キネマティックではどれほどの差があるのでしょう
と、比較プロットを落としてみました。

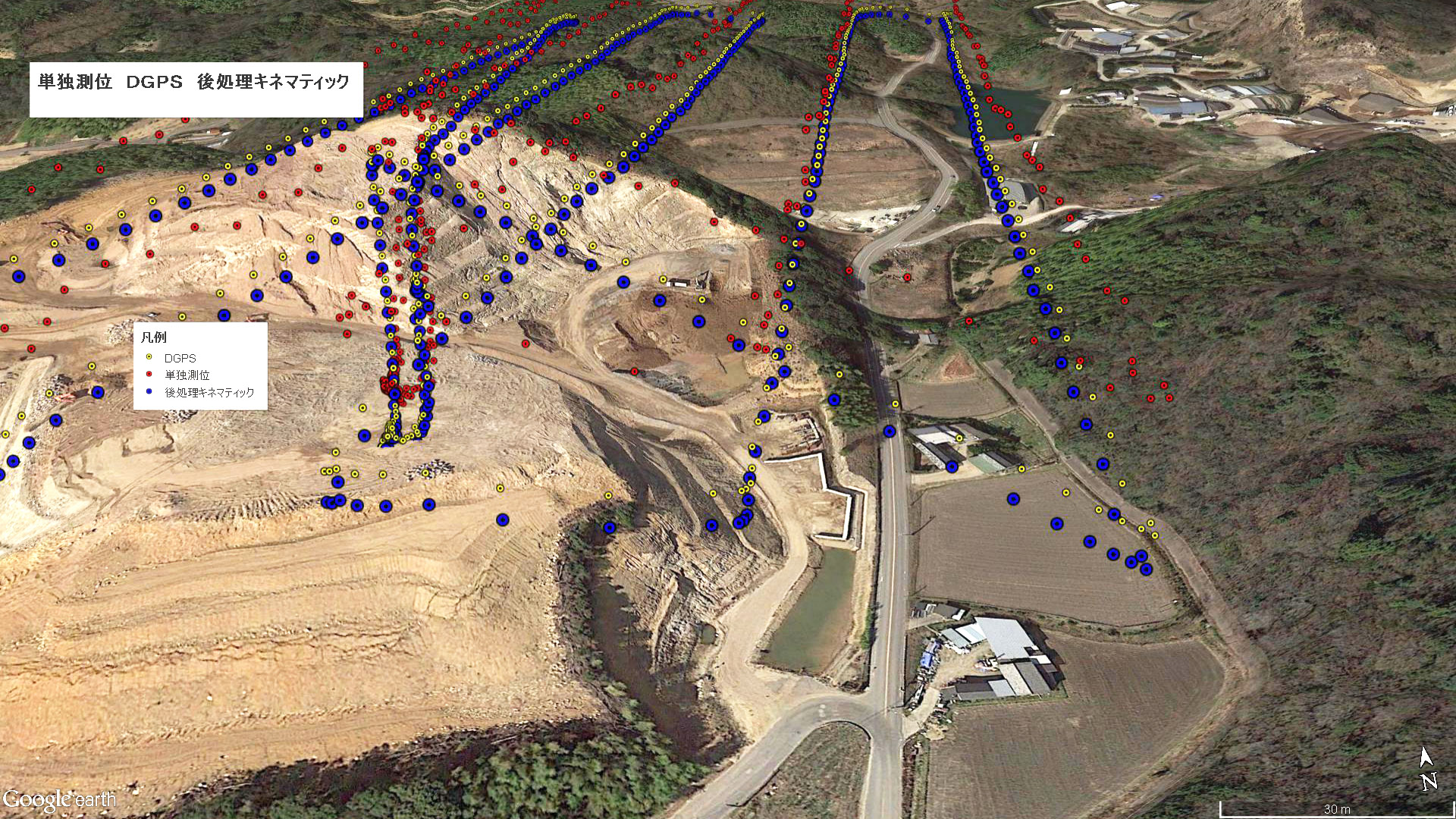
後処理キネマティックは位置誤差±5cm程度
DGPは後処理キネマを基準に±0.5m程度
単独即位は±5m以上
DGPSは水平はなんとか0.5m圏内ですがご存知のとおり高さはmオーダーの誤差があります。
いかに正確なシャター位置を決めれるかで、最終的な絶対標定に影響してきます。
相互標定では、写真に位置情報が無かったり又、位置情報が付記されてててもその誤差が
過大の場合、写真は繋がりますが絶対標定の際、綿密なGCP点の配点、数を慎重に計画しなければ
GCP点付近はそれなりに正確ですがGCP点が無いあたりは測量成果には使えない値が出てしまいます。
相互標定の時点でシャッター位置が±5Cm圏内なので、絶対標定で使うGCP点は極端に少なくしても
全体的に精度が保たれます。
場合によっては、GCP点が無し(相互標定のみ)でも精度の良い測地系のモデルを作成出来ます。
※※
UAVは移動体で連続撮影をするので、単純にGPSデータと写真データの時間の同期だけでは、
正確なシャッター位置の解を得ることは出来ませんのでご注意が必要です。